学 院: 西安外事学院工学院
项目名称: 基于机械创新竞赛的设计与实践
项目负责人:杜喜昭、陈小虎
一、项目基本情况
劳动项目名称: 基于机械创新竞赛的设计与实践
劳动项目类型: □基础劳动实践 R专业劳动实践
□综合劳动实践
劳动劳动类型: □日常生活劳动 □生产劳动 □服务性劳动
R专业劳动 □创新创业劳动 □其他
项目开展时间: 2023 年 5 月至 6 月
项目主题设计及项目内容简介:
劳动教育的目的:
机器人工程专业的劳动教育旨在培养学生的实际操作技能、团队合作能力和问题解决能力,使他们能够在机器人技术领域中胜任各种工作角色和任务。主要体现在以下几个方面:
1.实际操作技能培养:机器人工程领域需要学生具备实际的装配、调试和维护机器人系统的能力。劳动教育旨在让学生通过实际操作,掌握机器人硬件和软件的技能,从而能够有效地应用于实际工程项目中。
2.工程实践经验:机器人工程专业的学生需要在实际项目中获得经验,理解工程流程和方法。劳动教育提供机会,让学生从零开始构建、测试和改进机器人系统,从中学习解决问题和项目管理的能力。
3.团队合作能力培养:在机器人工程中,团队合作是不可或缺的。劳动教育鼓励学生参与小组项目,与同学一起协作解决问题,分工合作,锻炼团队合作和沟通技能。
4.创新和创造力培养:通过劳动教育,学生可以思考如何改进机器人系统的性能、功能和设计。这促使他们培养创新思维,提出新颖的解决方案,并在实践中实现创意。
5.实际问题解决能力:机器人工程师需要能够快速识别并解决现场出现的问题。劳动教育通过模拟真实工程环境,培养学生分析问题、迅速采取行动并找到解决方案的能力。
6.职业准备:机器人工程专业的毕业生通常会投身于工业、制造、自动化、航空航天等领域。劳动教育使学生能够掌握实际技能,使他们更具竞争力,适应职业发展的要求。
7.实践与理论的结合:劳动教育能够将学术课程中所学的理论知识与实际应用相结合,帮助学生更好地理解和应用所学内容。
通过这些目标,机器人工程专业的劳动教育旨在培养具备实际操作能力、团队合作精神和创新能力的机器人工程师,使他们在实际工作中能够做出积极贡献。
劳动教育与专业课程的结合:
将机器人工程专业的机械创新竞赛设计劳动教育与机械设计结合起来,可以为学生提供更丰富、实际且深入的学习体验。这种结合有助于培养学生的实际操作技能、工程实践经验和创新能力。
设计一个机械创新项目,要求学生结合机器人工程知识和机械设计原理,从头开始构建一个机器人系统。这可以涉及机械结构设计、零部件选型、运动控制、编程等多个方面。学生需要在实际操作中将机械设计和机器人工程技术结合起来。学生可以在机器人项目中进行机械结构的优化。学生可以亲自制造机械部件并进行组装。这种实际操作可以让他们了解机械制造流程,同时磨练他们的组装技能。鼓励学生在机器人设计中尝试创新的机械构思,如可变形结构、模块化设计等。这有助于培养他们的创新和设计能力。学生在项目展示中需要解释他们如何将机械设计和机器人工程技术结合,从而展示他们的综合能力。
通过将机器人工程专业的劳动教育与机械设计结合起来,学生能够在实际操作中深入理解机械原理和机器人技术,为他们将来在机器人领域的职业发展打下坚实基础。
项目内容简介:
本次劳动教育项目基于第十届全国大学生机械创新设计大赛进行开展。大赛要求进行1)模仿自然界动物的运动形态、功能特点的机械产品(简称仿生机械);2)用于修复自然生态的机械装置,包括防风固沙、植被修复和净化海洋污染 物的机械装置(简称生态修复机械)”设计。大赛设置设计“仿生机械”的内容,在于引导大学生主动认识大自然中的动物和其活动规律。参赛者设计“仿生机械”,重点是根据动物的运动形态、身体结构和功能特点,用巧妙的机构和机械结构来模仿实现。鼓励将“仿生机械”创新设计的成果,用于开展进一步的科学和应用研究,或开发成新型玩具产品。“生态修复机械”,主要是激发大学生热爱自然、保护自然的情怀。参赛者可结合当地或者自己家乡自然生态受人类活动等破坏的情况,设计和开发相 应的修复机械,包括帮助人类在沙漠环境中开展人工植树和植被修复的小型机械、草方格沙障设置机械、便携灌溉机械等;净化海洋污染物的范围很广,包括但不限于净化油泄露、微塑料等机械装置,主要是针对海洋污染问题,提出解决方案,完成样机设计、实现功能。
机械创新设计大赛需要学生亲自制造零部件、搭建装置,进行装配和调试,从而培养实际操作技能和加工工艺。通过思考如何改进现有装置、提升性能或应对挑战,学生培养了创新思维和创造力。有助于培养学生的团队合作和协调能力。机械创新设计大赛将学术理论与实际应用相结合,使学生能够将所学的机械设计知识应用于实际工程项目中,更好地理解和巩固所学内容。参加机械创新设计大赛不仅是学术成就的体现,还是个人技能和能力的证明。这样的经历可以为学生的职业发展增加竞争力。
二、项目开展过程及活动情况
CDIO工程教学模式是一种现代工程教育的教学方法,CDIO模式旨在培养学生在真实工程问题中的创新能力、设计能力、实施能力和团队协作能力。该模式强调学生在课程中通过实际项目和工程任务,学习如何将理论知识应用于实际工程实践中。指导教师将学生分组,各小组根绝CDIO模式按照以下几个阶段进行项目设计:
1.选择项目主题和目标:确定项目的主题,通常可以从课程内容、兴趣爱好或实际问题中选择。明确项目的目标,以及要解决的问题或要达到的目标。
2.文献调研和背景研究:在开始设计之前,进行文献调研,了解已有的类似设计、技术和研究。这有助于理解项目的背景和相关知识。
3.概念设计和创意生成:利用头脑风暴、讨论和研究,提出不同的概念和设计思路。鼓励团队成员提供创新的想法和解决方案。
4.选定设计方案:从概念中选择一个或多个最有潜力的设计方案。这些方案应该能够解决问题,并满足项目的技术和创新要求。以下案例均以仿生蝙蝠为例进行说明。
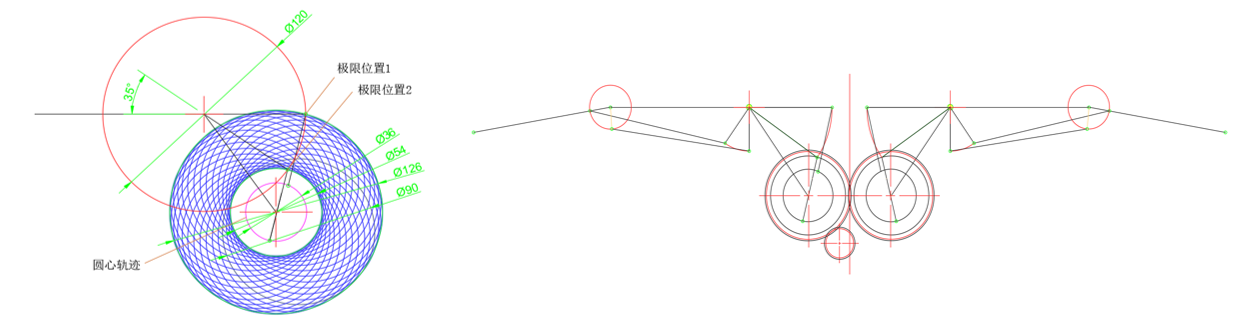
图1 仿生蝙蝠设计方案
5.详细设计和建模:在选定的设计方案基础上,进行详细的设计工作。使用计算机辅助设计(CAD)软件进行建模,制定具体的零部件尺寸和形状。

图2 仿生蝙蝠模型设计
6.材料选择和零部件制作:图纸完善后进入制作阶段,需要选择合适的材料,并开始制造机械零部件。零部件加工方面主要用到:机械加工(蝙蝠主体支撑架、连杆)、3D打印(蝙蝠外形)、手工加工(支撑杆、螺纹攻丝)等方法。在制作过程中,同学们发挥了吃苦耐劳的优良传统、为了更好的完成项目,不怕辛苦,付出很大的时间和精力,项目制作期间需要用到很多目前没有学到的新知识,同学们乐于学习新知识,愿意在新领域不断学习和进步,以提升自己的能力。团队协作能力有了很大提高,愿意在团队中分担责任和付出努力,共同完成任务。


图3 仿生蝙蝠零部件制作
7.装配和测试:将制造好的零部件进行装配,确保所有部件正确连接。进行初步的功能测试,评估装置的运行情况和性能。
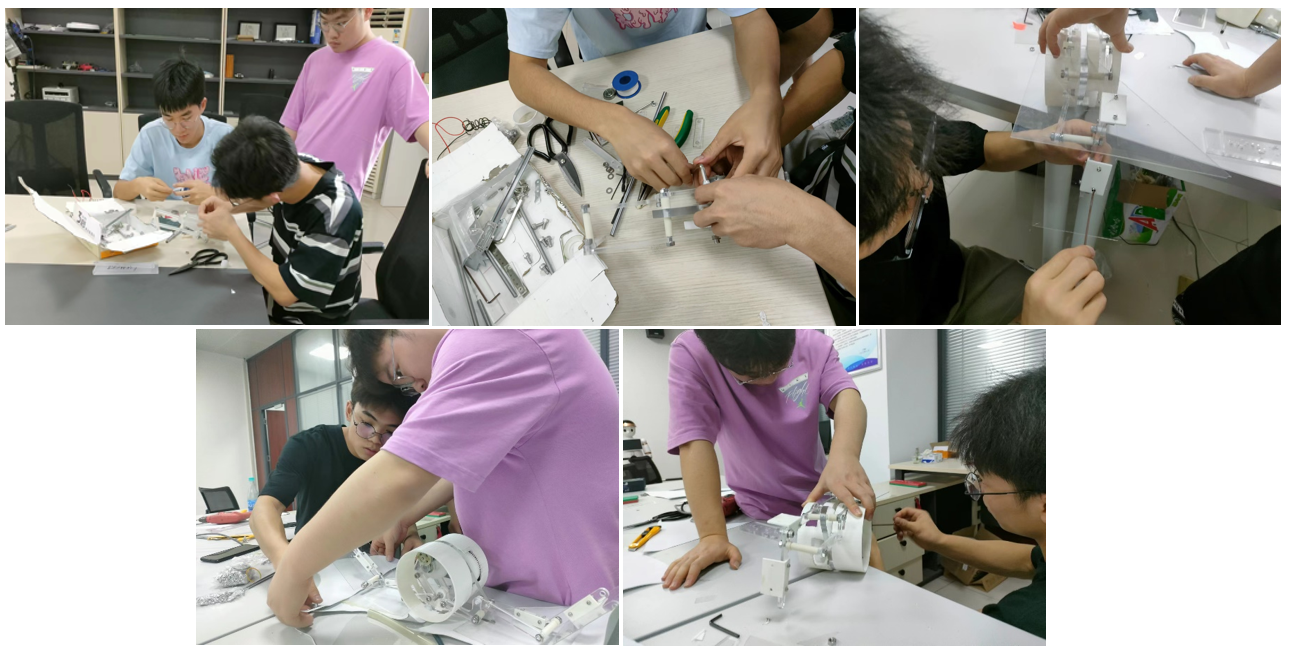
图4 仿生蝙蝠装配调试
8.优化和改进:基于测试结果,对装置进行优化和改进。调整部件尺寸、优化结构,仿生蝙蝠的优化主要在于装配的优化。
9.项目展示和评审:通过向评委展示作品,评审答疑、沟通交流,对自己的作品有了更深刻的认识,也有了进一步优化的创新点。
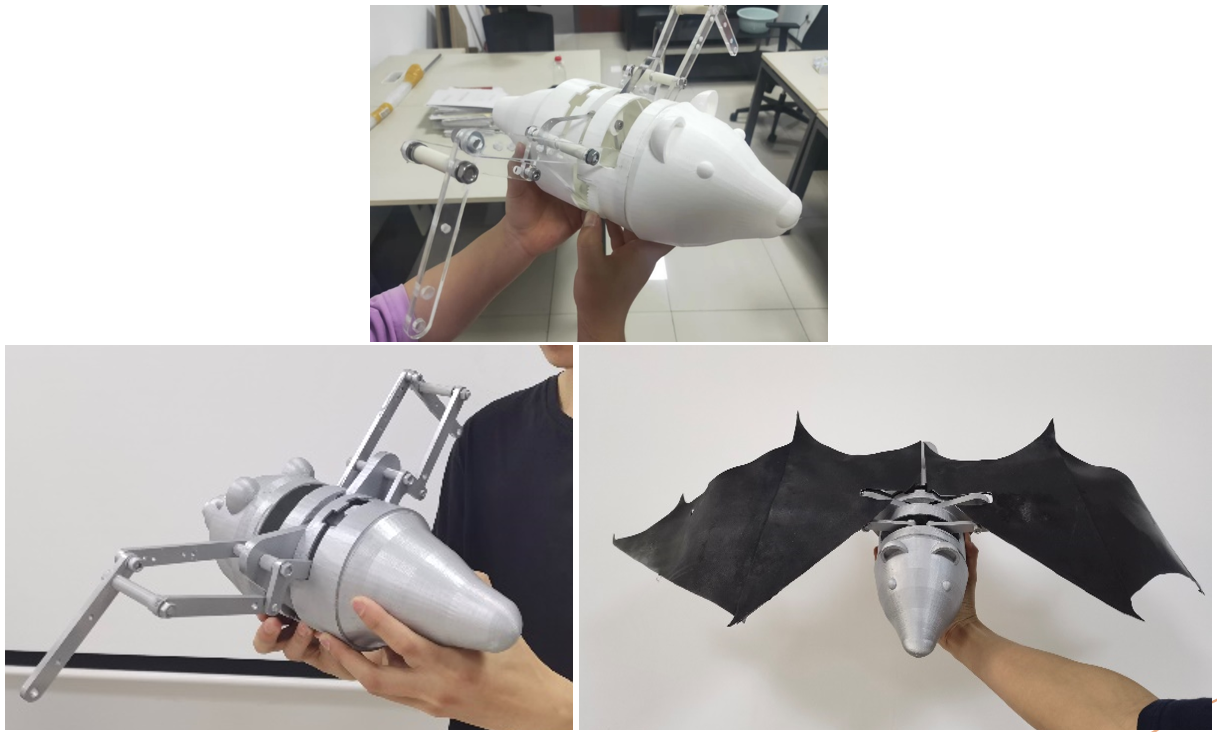
图5 仿生蝙蝠作品展示
通过这次机械创新设计大赛的实践,各团队成员均有了很大的收获。团队成员对工程图的绘制:齿轮、轴承、几何公差、表面粗糙度、连接与配合以及材料选择、电机选型与控制等有了更加全面、细致的认识。
同学们均表示,作品是其坚持不懈的努力,他们挥洒洋溢的汗水,是智慧思考的结晶。在老师悉心教导和大家团结合作完成作品的时间里,不论是AutoCAD的工程制图,还是UG三维建模,亦或是Pr视频剪辑,制作它的同时亦为我们打开了全新世界的大门。
各项目开展照片(现场实景)如下:
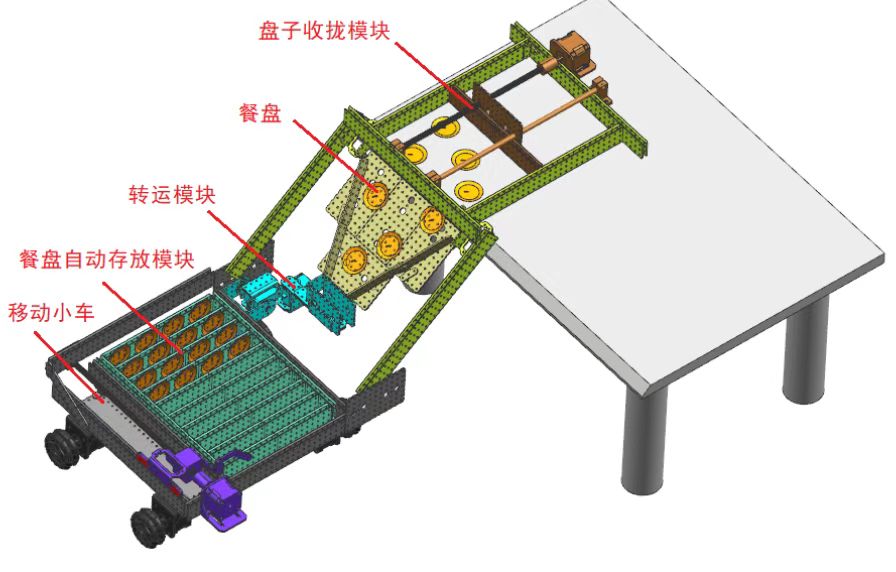
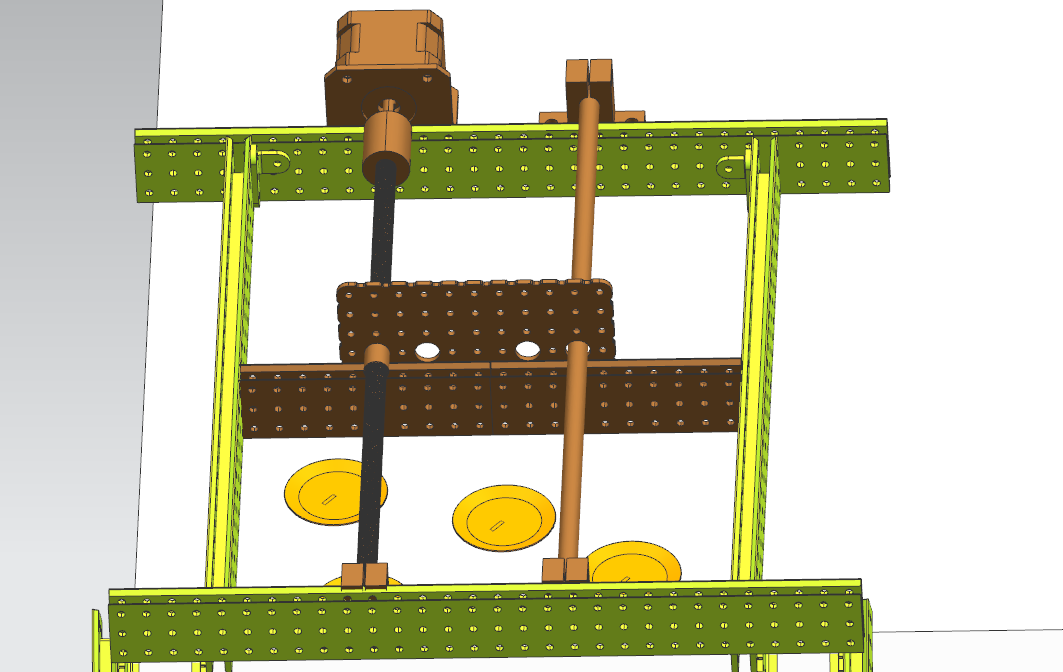
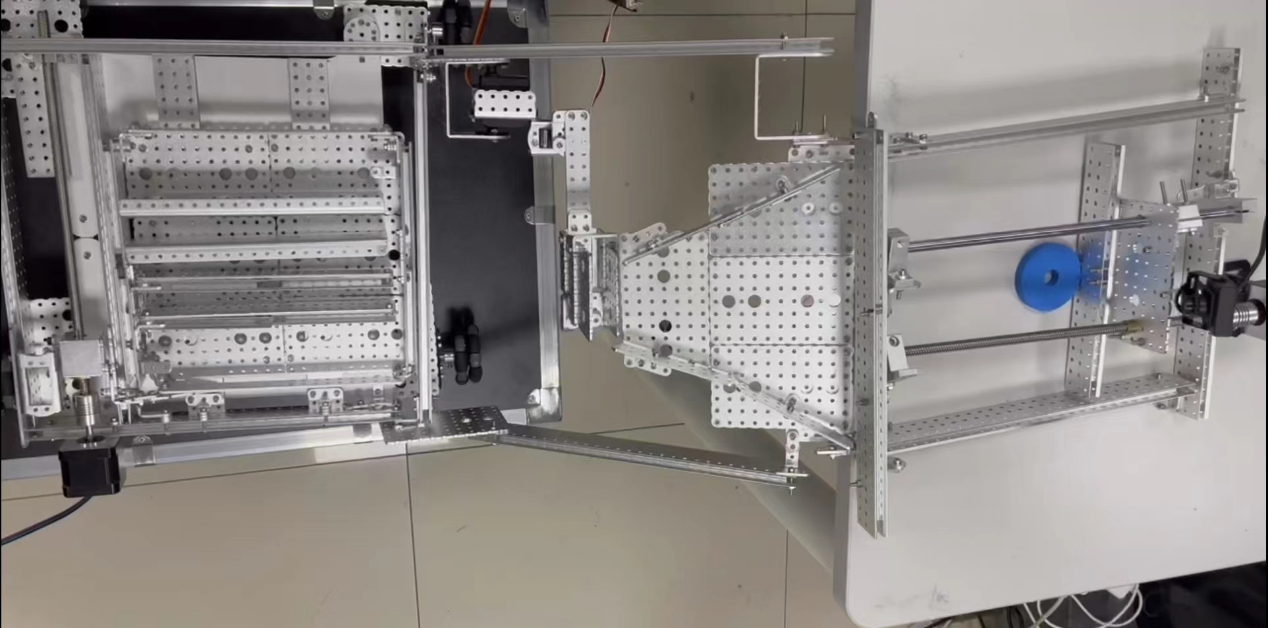
图6 餐盘收集机器人

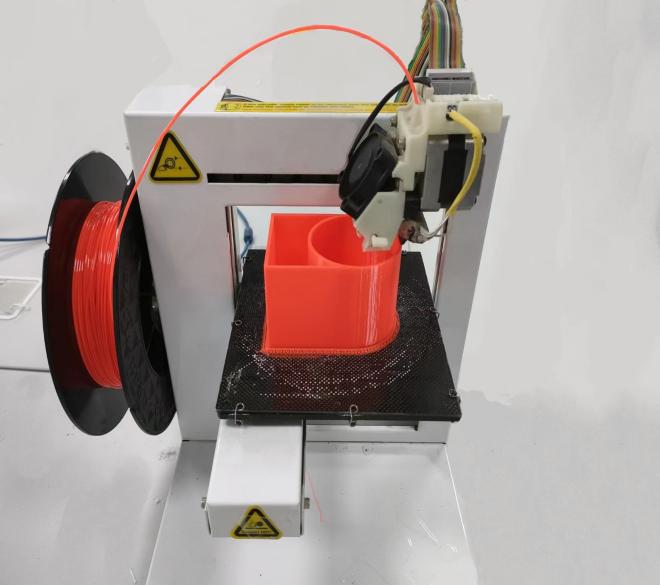
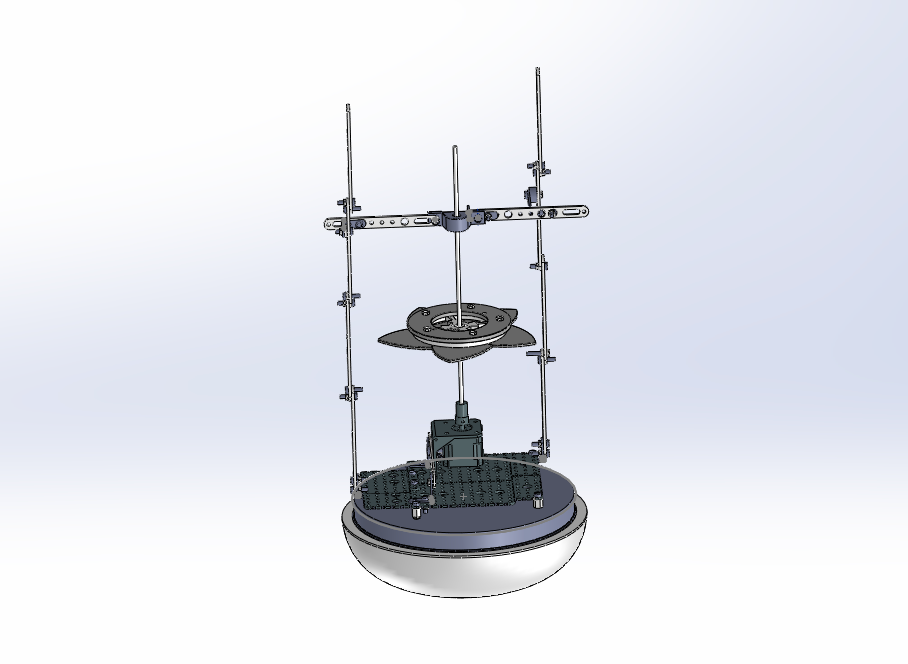
图7 仿生水母制作

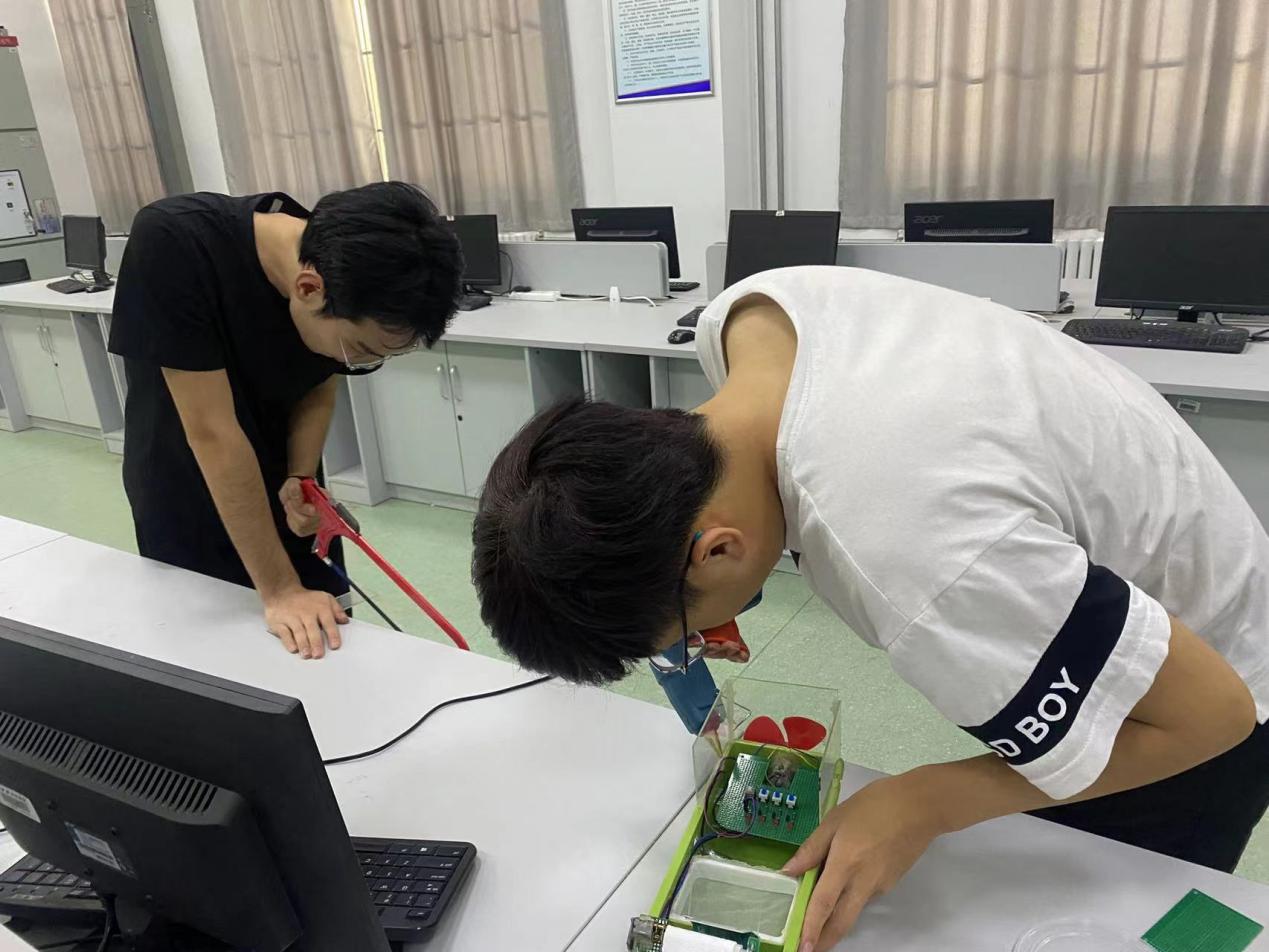
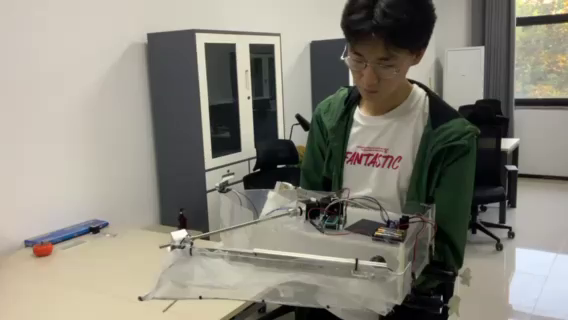
图8 水面垃圾收集器
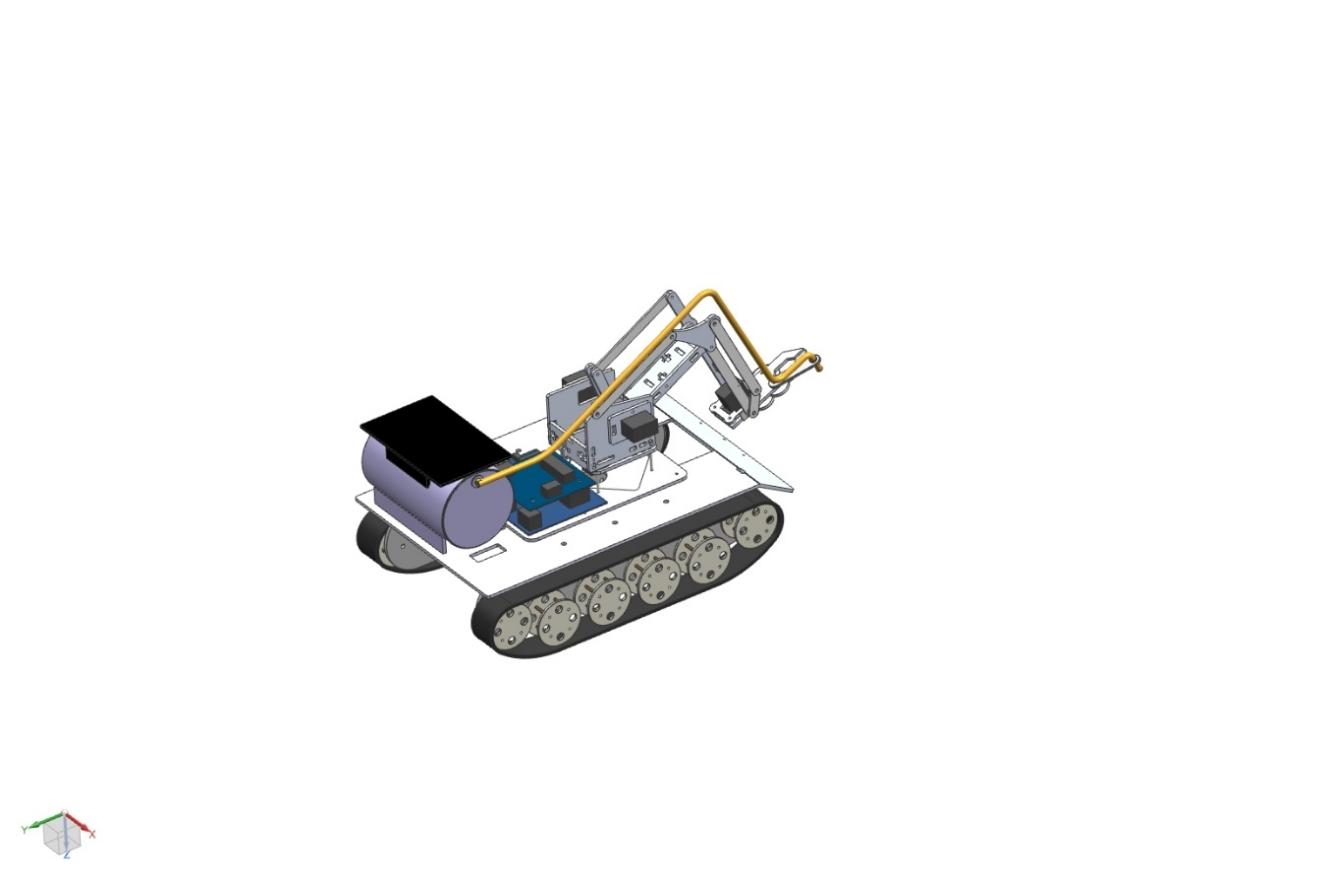
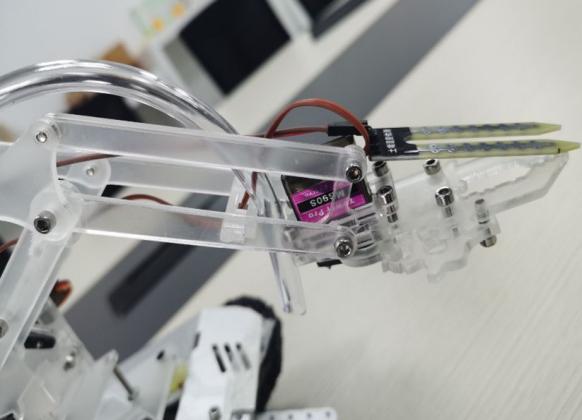
图9 多功能种植机器人

